



Trīs asu horizontālais pagrieziena pozicionētājs / metināšanas robota pozicionētājs
Tehniskie parametri
| Vertikāls apgrozījuma trīsaksiālais servo pozicionētājs | Horizontāls rotējošs trīsaksiāls servo pozicionētājs | ||||||
| Sērijas numurs | PROJEKTI | Parametrs | Parametrs | PIEZĪMES | Parametrs | Parametrs | PIEZĪMES |
| 1 | Nominālā slodze | 500 kg | 1000 kg | R400 mm rādiusā no otrās ass | 500 kg | 1000 kg | R400 mm/R500 mm rādiusā no otrās ass |
| 2 | Standarta vārpstas griešanās rādiuss | R1200 mm | R1500 mm | R1200 mm | R1800 mm | ||
| 3 | Standarta starpvārpstas griešanās rādiuss | R400 mm | R500 mm | R400 mm | R500 mm | ||
| 4 | Pirmās ass pagrieziena leņķis | ±180° | ±180° | ±180° | ±180° | ||
| 5 | Otrās ass rotācijas leņķis | ±360° | ±360° | ±360° | ±360° | ||
| 6 | Pirmās ass nominālais augšupvēršanas ātrums | 50°/D | 24°/D | 50°/D | 24°/D | ||
| 7 | Otrās ass nominālais rotācijas ātrums | 70°/D | 70°/D | 70°/D | 70°/D | ||
| 8 | Atkārtojiet pozicionēšanas precizitāti | ±0,10 mm | ±0,20 mm | ±0,10 mm | ±0,20 mm | ||
| 9 | Pārvietošanas rāmja robežizmērs (garums × platums × augstums) | 2200 mm × 800 mm × 90 mm | 3200 mm × 1000 mm × 110 mm | 2200 mm × 800 mm × 90 mm | 3200 mm × 1000 mm × 110 mm | ||
| 10 | Pozīcijas pārslēdzēja kopējais izmērs (garums × platums × augstums) | 4000 mm × 700 mm × 1650 mm | 5200 mm × 1000 mm × 1850 mm | 4000 mm × 700 mm × 1650 mm | 4500 mm × 3600 mm × 1750 mm | ||
| 11 | Pirmās ass rotācijas centra augstums | 1350 mm | 1500 mm | 800 mm | 1000 mm | ||
| 12 | Barošanas avota apstākļi | Trīsfāžu 200 V ± 10 % 50 Hz | Trīsfāžu 200 V ± 10 % 50 Hz | Trīsfāžu 200 V ± 10 % 50 Hz | Trīsfāžu 200 V ± 10 % 50 Hz | Ar izolācijas transformatoru | |
| 13 | Izolācijas klase | H | H | H | H | ||
| 14 | Iekārtas neto svars | Apmēram 1800 kg | Apmēram 3000 kg | Apmēram 2000 kg | Apmēram 2000 kg | ||
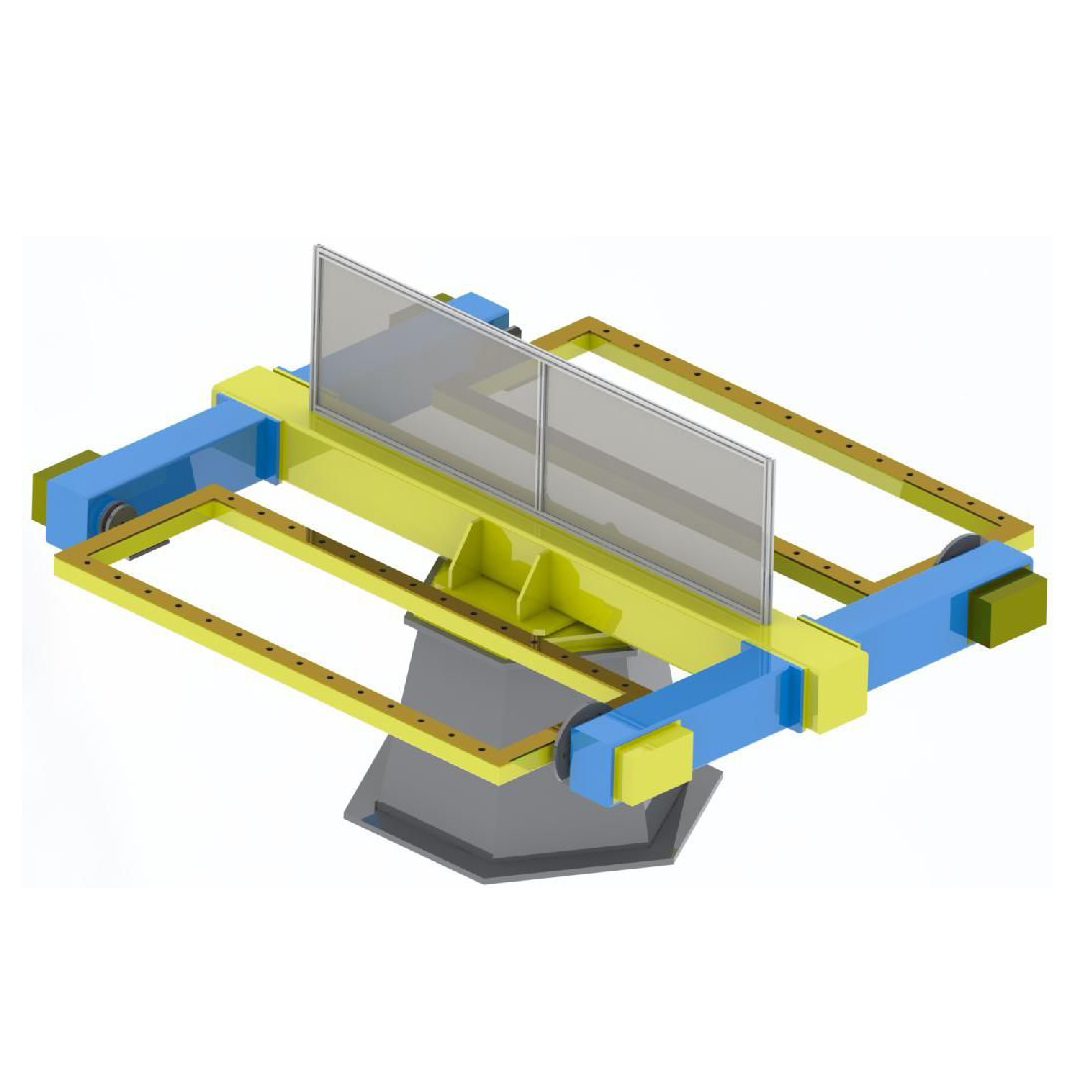
Horizontāls rotējošs trīsaksiāls servo pozicionētājs

Vertikāls apgrozījuma trīsaksiālais servo pozicionētājs
Struktūras ievads
Trīsaksiālais vertikālais apgrozījuma servo pozicionētājs galvenokārt sastāv no metināta integrēta rāmja, apgrozījuma pārvietojuma rāmja, maiņstrāvas servomotora un RV precīzijas reduktora, rotācijas balsta, vadoša mehānisma, aizsargvairoga un elektriskās vadības sistēmas.
Metinātais integrālais rāmis ir sametināts ar augstas kvalitātes profiliem. Pēc atkvēlināšanas un sprieguma mazināšanas tas tiek apstrādāts ar profesionālu apstrādi, lai nodrošinātu augstu apstrādes precizitāti un atslēgu pozīciju precizitāti. Virsma ir pārklāta ar pretkorozijas krāsu, kas ir skaista un dāsna, un krāsu var pielāgot atbilstoši klienta prasībām.
Pagriešanas pārvietojuma rāmim jābūt sametinātam no augstas kvalitātes profiltērauda un apstrādātam ar profesionālu mehānisko apstrādi. Virsmai jābūt apstrādātai ar standarta vītņotiem caurumiem montāžas pozicionēšanas instrumentu uzstādīšanai, kā arī jāveic krāsošana, melnošana un rūsas novēršanas apstrāde.
Kā jaudas mehānisms ir izvēlēts maiņstrāvas servodzinējs ar RV reduktoru, kas var nodrošināt rotācijas stabilitāti, pozicionēšanas precizitāti un
Ilga izturība un zems atteices līmenis. Vadošais mehānisms ir izgatavots no misiņa, kam ir laba vadītspēja. Vadošajai pamatnei ir integrēta izolācija, kas var efektīvi aizsargāt servomotoru, robotu un metināšanas barošanas avotu.
Elektriskā vadības sistēma izmanto japāņu Omron PLC pozicionētāja vadībai, nodrošinot stabilu veiktspēju un zemu atteices līmeni. Elektriskās komponentes ir izvēlētas no pazīstamiem zīmoliem gan mājās, gan ārzemēs, lai nodrošinātu kvalitāti un lietošanas stabilitāti.
Gaismas bloķēšanas vairogs ir salikts no alumīnija profila un alumīnija plastmasas plāksnes, lai aizsargātu pret loka gaismu, kas rodas metināšanas un griešanas laikā.








